

Американські інженери Девін Керрол (Devin Carrol) і Марк Йім (Mark Yim) з Пенсільванського університету створили прототип двоколісного робота IceBot. Усі основні елементи конструкції робота складаються з водяного льоду. Випробування показали: робот може пересуватися по горизонтальній твердій поверхні при кімнатній температурі, а при більш низьких температурах (до –17°C) — рухатися по льоду і навіть долати невеликі підйоми.
В роботі, яка була представлена на конференції IROS 2020 року, розробники відзначають: їхня головна мета — перевірка можливості використання льоду в якості основного конструкційного матеріалу. В майбутньому лід можна використовувати для створення автоматичних систем, здатних до самозбирання, самовідновлення та реконфігурації для роботи в місцях з низькою температурою, де в надлишку присутній лід (наприклад, у полярних областях Землі та Марса або на крижаних супутниках Юпітера і Сатурна).
Детальніше про IceBot
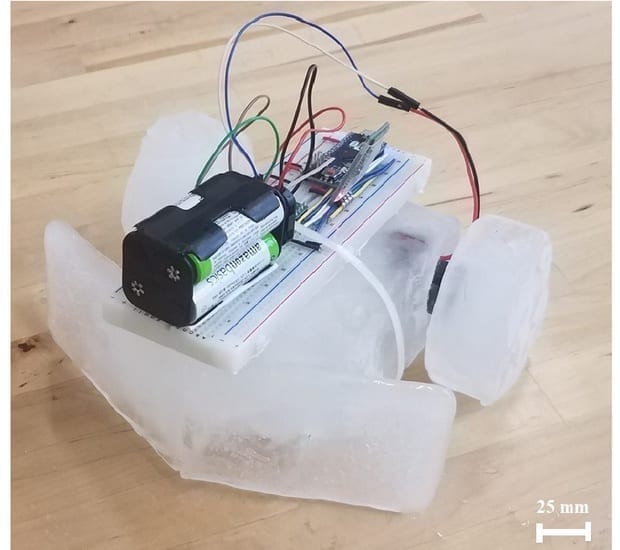
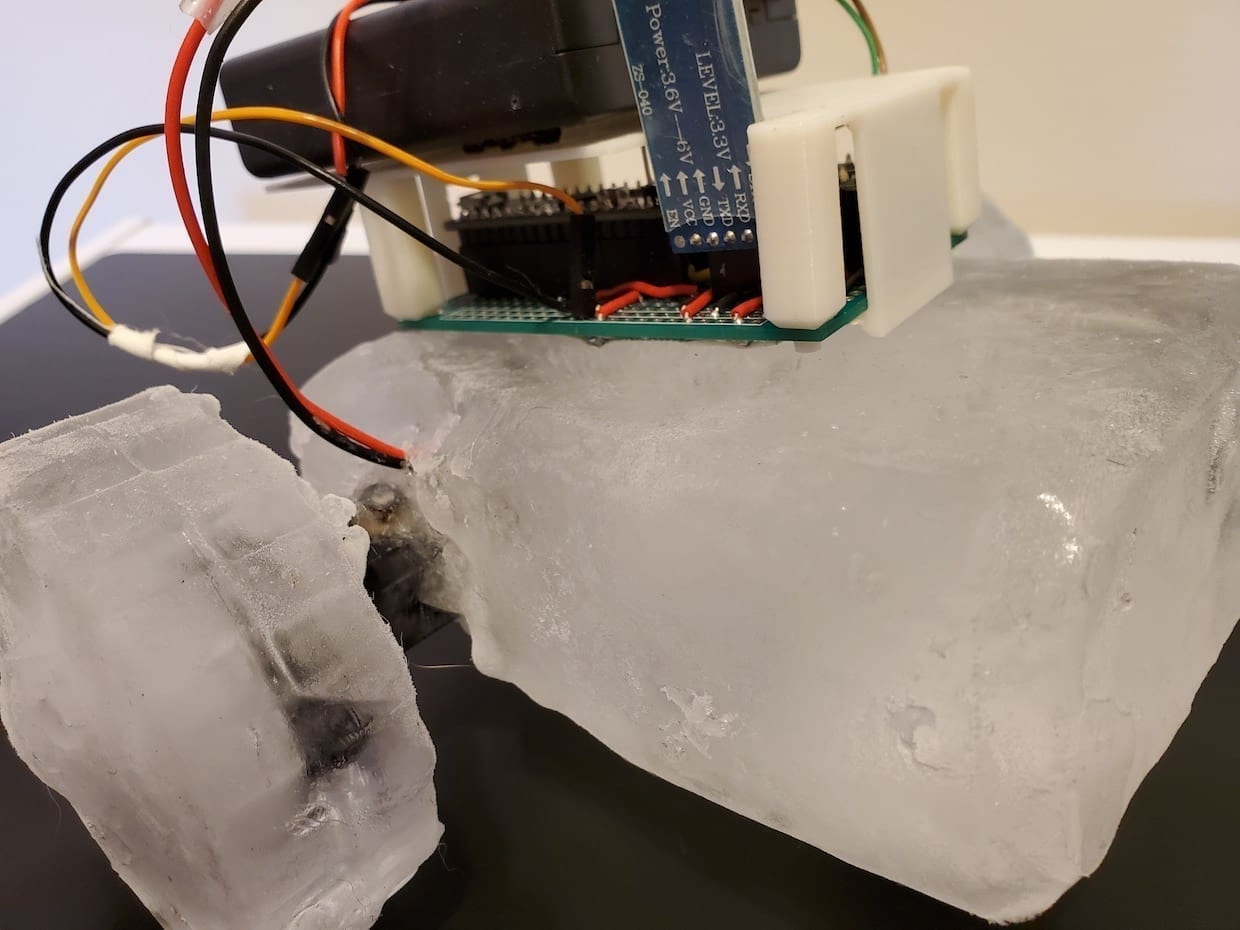
Розміри двоколісного IceBot — 14×20×13 см, вага — 6,3 кг. Корпус, колеса і бампер, встановлений в передній частині, виготовляються з водяного льоду. В якості третьої точки опори в передній частині вставлений м’яч для пінг-понгу. Для управління робота використовується мікроконтролер на платі Arduino Micro, яка розміщується зверху на корпусі. Команди управління надходять із телефону через Bluetooth-модуль. У якості актуатора інженери використовували два електродвигуни, які знаходяться в захисних кожухах, в крижаному блоці корпусу. Така модульна конструкція дозволяє обмежити танення крижаного корпусу від електричних компонентів. А розташування бортової електроніки зверху, так само як і захисні кожухи на електродвигунах, виключає потрапляння на них води в разі тепловиділення.

Для того, щоб ефективно передати крутний момент і при цьому уникнути прослизання осі двигуна в колесі, на кінці осі закріплюється пластикова маточина, що дозволяє збільшити площу поверхні, яка взаємодіє з льодом. Маточина складається з декількох з’єднаних разом 3D-друкованих зубчастих пластин. Конструкція поміщається всередину колеса, в якому попередньо висвердлюється отвір відповідного діаметру, і яке потім заповнюється водою, а після — заморожується. Інші способи виготовлення отворів для впровадження актуаторов у лід, такі як вплив нагрітим стрижнем і плавлення бутанової пальником, під час експериментів приводили до утворення значної кількості гарячої води і небажаної деформації крижаної деталі, тому були визнані менш ефективними.
Експерименти показали, що під час руху робота при кімнатній температурі через деякий час між ним і поверхнею утворюється тонкий шар води, який зменшує зчеплення. Колеса робота починають прослизати, і його рухливість знижується. Тимчасово цю проблему можна вирішити, збільшуючи вагу прототипу.
При температурі нижче нуля (випробування проходили при –17°C) робот може впевнено рухатися по рівній крижаній поверхні і долати підйоми до 1,5 градусів. При великих значеннях кутів колеса починають ковзати. При підйомі від трьох градусів і вище робот не може самостійно рухатися вгору по схилу.
Проблеми і їх вирішення
Основною проблемою при створенні прототипу крижаного робота IceBot, за словами розробників, була складність роботи з льодом при кімнатній температурі: кожні 15 хв їм доводилося повертати матеріал назад у морозильну установку, інакше він деформувався, що позначалося на його подальшій стабільності. Перепади температур негативно впливали на з’єднання крижаних елементів, в яких утворювалися тріщини. Однак ці проблеми вирішуються проведенням всіх робіт при низьких температурах. Крім того, при зниженні навколишньої температури зростає коефіцієнт тертя льоду, що покращує можливості робота при підйомах.
Плани по вивченню інших планет
За словами авторів, це тільки перший крок на шляху до створення системи, яка працює при низьких температурах і здатна до самозбирання і автоматичного ремонту. Надалі інженери планують розробити автоматизований метод складання робота, на основі сполучних модулів, які інтегруються в блоки льоду і не вимагають дротових з’єднань, а для нарізування крижаних модулів планується використовувати нагріту дріт. Усі операції при цьому повинні виконуватися при мінімальних витратах енергії, так як її запаси під час реальних місій на інших планетах будуть обмежені.
Інженери продовжують експериментувати і вдосконалювати конструкції роверів для вивчення інших планет. Так, наприклад, нещодавно вони створили прототип колісного планетохода-трансформера DuAxel, передня частина якого з двома колесами здатна відокремлюватися від основного апарату і пересуватися самостійно. Такий планетохід може досліджувати ділянки з важким ландшафтом і залишатись при цьому з’єднаним з базою тільки за допомогою кабелю.
Читайте також: Бренд Oakley представляє маску для обличчя, яка запобігає запотіванню окулярів.