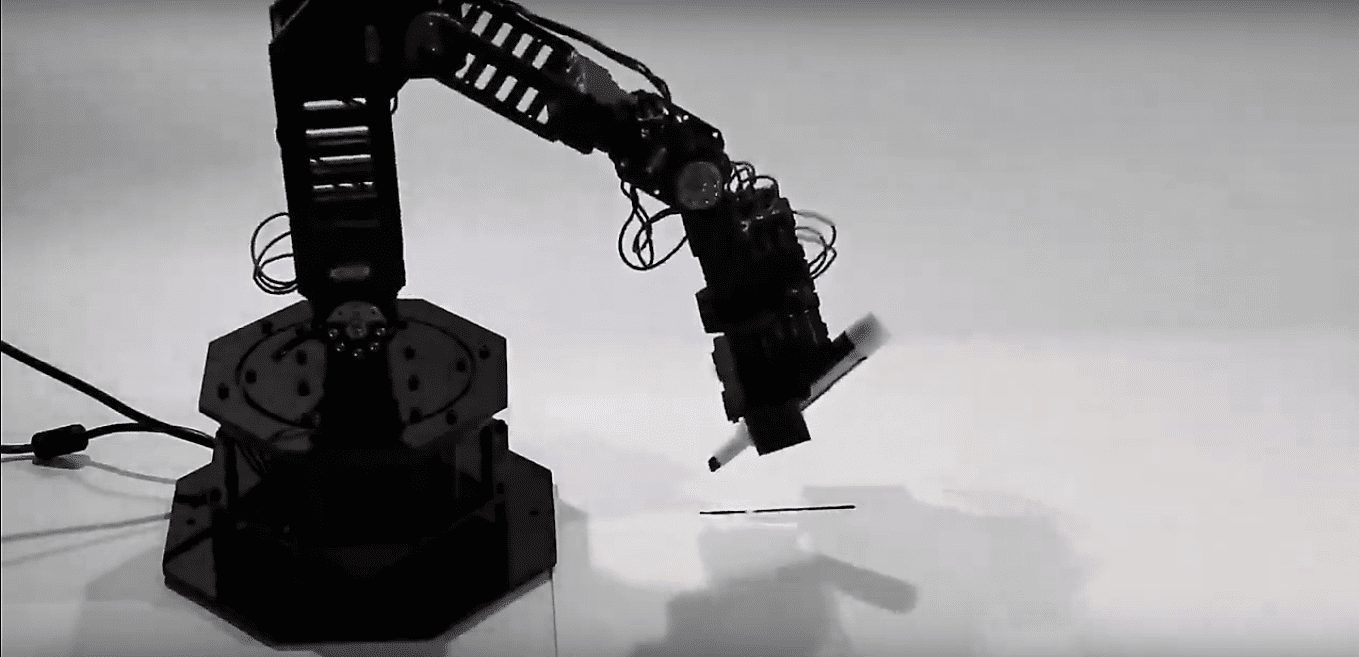
Американские инженеры научили роборуку самостоятельно выполнять задания с помощью предварительного изучения возможностей собственного тела. Для этого роборука сначала исследовала пространство, поочередно выполняя тысячу разных движений и регистрируя конечную точку каждого из них, а затем использовала эти данные при выполнении двух заданий: написания приветствия и переноса мячиков. Описание исследования опубликовано в Science Robotics.
Люди обладают хорошей способностью к пониманию собственного тела. При отсутствии особых неврологических нарушений мы умеем планировать свои действия, необходимые для ходьбы или того, чтобы поднять предмет, а также можем себе представить, что будет, если мы слишком быстро вплотную подойдем к стене.
Восприятие своего тела помогает нам совершать и планировать действия, но роботизированным системам такая способность недоступна: обычно они обучаются что-либо делать через многочисленные повторения заранее запрограммированных действий. Это очень эффективно для ограниченного количество действий, но может не сработать при расширении потенциала системы. Именно поэтому для обучения роботов часто используются алгоритмы обучения без учителя, позволяющие им учиться выполнять действия без заранее размеченных данных — то есть почти самостоятельно.
В новой работе Роберт Квятковски (Robert Kwiatkowski) и Ход Липсон (Hod Lipson) из Колумбийского университета решили обучить роборуку выполнять действия самостоятельно, сперва научив ее воспринимать границы и возможности собственной конструкции. Для этого они заставили роборуку поочередно выполнять тысячу разных движений в разных направлениях, регистрируя получившееся действие в абсолютных координатах местоположения манипулятора. После этого данные обо всех траекториях использовали для того, чтобы с помощью методов глубокого обучения научить робота двум действиям: поднятию и перемещению шариков и написанию текста. Зная окружающее себя пространство, роборука смогла научиться предсказывать дальнейшее местоположение манипулятора для эффективного выполнения задания.
Интересно, что эффективность полученного алгоритма обучения не зависит от морфологии робота: после того, как на движущуюся часть роборуки поместили специальный ограничитель, робот смог заметить изменения собственного тела и заново научился определять свое положение, после чего, уже с помощью новых данных, смог продолжить выполнение задания.